
As a network node, submarines can receive, process, and share mission-critical distributed sensor data. In addition, the submarine can be used as a deployment platform for Submarine Tactical Unmanned Aerial Vehicles (STUAVs). STUAVs can transmit critical data and deploy outboard sensor systems. As a "system administrator" for Unattended Ground Sensors (UGS), the submarine extended its support to Special Operations Forces (SOF) and sneak intelligence, surveillance and reconnaissance (ISR) in denied access areas. . The submarine has long been secretly stationed and can perform non-provocative observations of enemy activities on land through an unattended ground-based sensor system (detection, monitoring and communication for the target of interest). This article aims to explore the capabilities needed to maximize unattended ground sensor performance and minimize its volume. The unattended ground sensor system deployed by the submarine tactical drone must be packaged to ensure that the unattended ground sensor system is the available load of the submarine tactical drone and will be deployed as part of the grid and embedded in the ground to ensure The task cycle is masqueraded to achieve Low Probability of Detection (LPD) and Low Probability of Interception (LPI). Once deployed, the ability of unattended ground sensors to detect, monitor, and communicate information provides a new way for intelligence, surveillance, surveillance, and reconnaissance and targeting (ISRT).
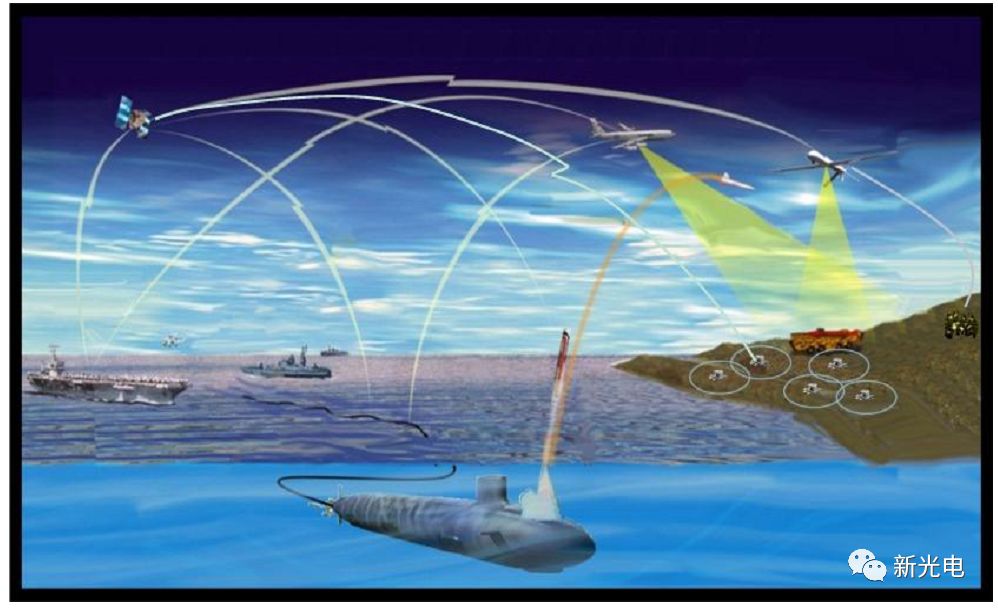
Figure 1 Submarine time sensitive target detection and monitoring
This paper describes a network-centric system-level concept for Time Critical Targets (TCT) probing. Time-sensitive targets include the Scud missile launcher, tanks, armored transport vehicles (APC) and the military. The goal is to detect, identify, monitor, and transmit information to the accusation center in real time. The submarine tactical UAV sensor system and the unattended ground sensor under the ship become an important means of detecting time-sensitive targets, and can provide battlefield damage assessment (BDA) after hitting (confrontation) time-sensitive targets.
The detection of time-sensitive targets depends on the location of the sensor, the transmission of information to the Command Control Communication and Computer Intelligent C4I station, and data analysis. We propose a network-centric concept in which a transmitting and receiving station is considered a node in a combat network. The advantage of this distributed approach is that the information is automatically routed to the relevant node and the system operation is uninterrupted if a node fails. Time-sensitive targets can be detected using unattended ground sensors with acoustic, seismic and magnetic sensors. These Measurement and Signal Intelligence (MASINT) sensor systems can be deployed from submarine tactical drones. As a “system administrator,†submarines can deploy drones with measurement and signal intelligence system loads and receive, process, and share mission-critical distributed sensor data during ISRT.
All of the components involved in the detection and monitoring of this concept time-sensitive target shown in Figure 1-1 are listed below:
Submarine: UAV deployment, network node receiving, processing and sharing sensor distributed sensor data.
STUAV: Sensor deployment, sensor and submarine information transfer.
UGS: Classify sensor characteristics as TCT, continuously monitor TCT and use an intermediary platform (such as STUAV) to transmit data to the submarine via long-distance communication or Lineof site (LOS).
Unmanned aircraft laser technology: detection and data communication of enemy activities.
Current technology has been used to design and develop UGS that can measure, process, and communicate with TCT for acoustic, seismic, and magnetic data. Unattended ground sensors can be combined with low-power circuits, real-time signal processing units, long-life power supplies, and rugged packaging. Using commercial off-the-shelf technology, airborne sensor systems can detect, monitor, and transmit data over the entire operational cycle.
In the Intelligent Battlefield Preparation (IPB) phase, the sensing system on STUAV assists in detecting potential threat areas to ensure continuous intelligence surveillance and detection. Laser technology and other ISR equipment identify potential areas for STUAV to deploy UGS.
This article discusses TCT detection and monitoring in detail in subsequent sections. The second section discusses STUAV as a deployment platform for sensor systems such as MASINT UGS. The third section describes the MASINT UGS for detecting and monitoring TCT. Section 4 describes the bidirectional link communication of this data from the sensor to the command and control node. Section V gives recommendations for conclusions and future work.
Submarine tactical drone
Nowadays, sensor platforms that can obtain information on coastal areas are not all applicable to submarines, even if they are not directly controlled by submarines. The “organic drone†can greatly expand the range and monitoring capabilities of the submarine. The submarine's concealment allows small UAVs to be launched in offshore areas, performing some ISRT operations (which can penetrate enemy territory) to capture and maintain the risk of air superiority. These operations include laser scanning of the ground and/or deployment of MASINT UGS in the form of a load. Improved or new technologies are now available to improve the voyage, range, survivability, capacity, and mission support capabilities of the drone system while still maintaining cost within acceptable limits.
One of the biggest problems with submarine deployment of drones is the launch of underwater drones. Today's attack submarines use a variety of transmitter systems to deploy a large number of different types of loads, ranging from environmental sensing devices to large weapons such as torpedoes and cruise missiles. Transmitter systems range in size from 3" anti-tube to 25-inch diameter Vertical Launch System (VLS). The load capacity necessary to deploy a large number of UGS is likely to make the size of the drone too large for existing launch systems (except for torpedo tubes and VLS). Other possible launchers include vertical launch tubes for advanced sails to be deployed on Virginia class submarines.
The Loitering Electronic Warfare Killer (LEWK) is an example of a future submarine launching a drone. Figure 2-1 shows this variable large-wing aircraft using inflatable propeller technology. The LEWK Advance Concept Technology Demonstration (ACTD) presents a low-cost flight "truck", also known as a hovering drone. This recyclable UAV system is capable of carrying approximately 200 pounds of load to perform missions with 8 voyages, flying altitudes of 100-15,000 feet and speeds of 100-150 knots. LEWK converts a highly compact ammunition into a large wing long-haul aircraft using a unique inflatable propeller technology. In its loading configuration, the LEWK's highly compact ammunition profile and universal bomb are similar in size and weight. After launch, the compact becomes a drone. Recycling by parachute. The drone is accused by a standard mission avionics set, and the GPS/inertial navigation avionics system is responsible for receiving re-task assignments in dynamic flight. Pre-programmed and in-flight re-task assignment support interferes with traditional and low-visibility systems, sending joint-effect cluster munitions to GPS coordinates or targets targeted by onboard optoelectronic/infrared sensors, and supports signal relay and combat management. Cost and performance goals are achieved by integrating a number of newly developed commercial and military technologies. This includes low-cost sensors, GPS and inertial navigation avionics systems, high-speed computers, loads that support radar interference, existing ammunition, and heavy-duty piston engines. LEWK is an unmanned, long-haul, recyclable, interference platform that can be used in all threat environments. It can carry loads of sufficient accuracy and can work in concert with the threat allegation architecture.
The LEWK ACTD was accused by the US Air Force and included the US Army, the US Navy, and the US Marine Corps. The European Command is a user sponsor of the 4-year ACTD. LEWK Technology Management is under the responsibility of the Marine Corps System Command. The European Command is the operational manager and the transportation management is the responsibility of the Air Force Aviation System Center. The overall ACTD regulation is the responsibility of the OSD officials in the Pentagon.
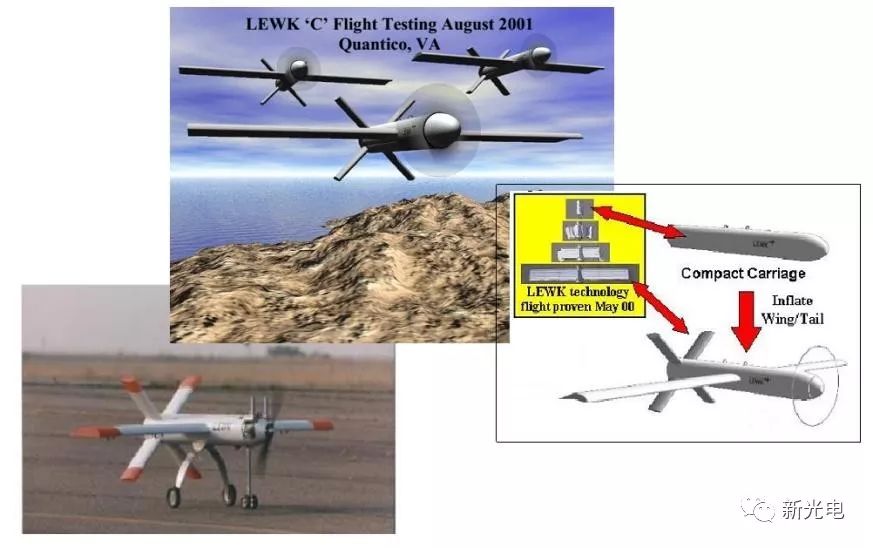
Figure 2 Circling Electronic Warfare Killer (LEWK)
The drone needs to be package protected to withstand the deep pressures of fluid power and underwater launch. When the All Up Round (AUR) (including the package and the drone) is emanating from the transmitter system and safely leaving the submarine outer casing, the AUR's positive buoyancy will bring it to the surface. The drone needs to be sent to a sufficient height to maintain the flight in a manner such as a rocket engine or a gas generator.
Communication between the drone and the submarine is done by the RF link. This link can make changes to the drone mission plan and can receive drone operational status, mission status, and sensor data information. The high degree of autonomy inside the drone saves continuous communication with the submarine. This can reduce the vulnerability of the submarine because there is no need to have a communication mast throughout the mission. A photoacoustic method can also be employed in which a drone strikes a laser beam toward the surface of the water to produce a sound communication signal within the water for underwater submarine detection. Due to the use of a narrow laser beam, this method is concealed in the air, it is difficult to intercept and allows the submarine to travel at high speed and deep water during the communication reception phase. Similarly, the drone can receive high frequency acoustic communications from the submarine Unmanned Underwater Vehicle (UUV), and obtain a flight command or activation signal by detecting the water surface near the submarine to maintain underwater concealment.
Laser technology not only generates and detects surface vibrations, but also penetrates and analyzes solid surfaces such as the ground, detecting buried facilities, mines or military movements. The low-power detection laser beam detects the sound vibrations of the human body and surrounding structures, thereby passively monitoring the military. Probing techniques can be used as smart fuzes to monitor vibration transients or spectra of a particular target; or for vibrating signals that are scanned inside and outside of an object to locate its spatial time. Laser technology applied to coastal areas supports port defense and detection of forces moving freely to potentially threatened areas.
When the drone completes its mission, its mission plan will direct it to an appropriate location, sneak into the ocean or land on a distant land or near water to the fleet aircraft carrier.
Detection and monitoring with MASINT UGS
Since network-centric sensor communication is required between platforms, the Expeditionary Sensor Grid (ESG) and the end-to-end sensor gateway nodes are demonstrated. ESG can connect small, remote, and inexpensive ISR devices to the network in such a way that all services can share distributed sensor data within the battlespace. Such ISR TCT detection and monitoring devices include UGS (shown in Figure 3-1) and other STUAV sensor loads, such as laser systems.
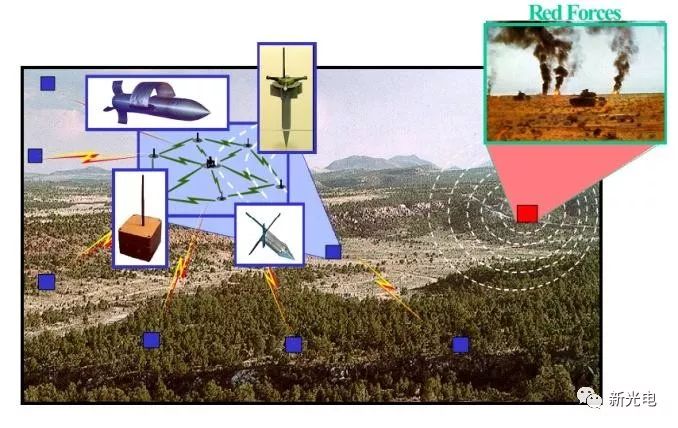
Figure 3-1 UGS in the ESG
Current technology can identify TCTs in real time by using sensor systems that include acoustic, seismic and magnetic sensors, low power digital signal processors, low profile antenna communication links, and hidden satellite links. The airborne MASINT system can identify the vehicle by identifying the vehicle mass and target distance based on the target engine type and number of cylinders, GPS positioning and direction of operation. The system can also identify the military. The acoustic, vibration, and magnetic characteristics of the target can be stored as "characteristic vectors" for accurate detection by the data signal processing (DSP) unit. Due to the internal sensor processing, only a small amount of data needs to be transmitted, such as target recognition and location.
The sound and vibrational spectrum of the vehicle's engine and motion on the ground provide the MASINT sensor system with the ability to identify vehicle types at specific distances. Accurate TCT detection is possible even in the presence of high winds on the ground. By applying a low noise power supply to the preamplifier (control microphone), the effect of the noise source on the collected sampled data can be reduced. The way the next-generation boards take to reduce the operating voltage also reduces the noise at the front end of the system. Although the sound signal is affected by weather and terrain, the sensing system can detect high-value ground vehicles under heavy storm conditions.
Once the command and control processor is deployed in the air, initial subsystem detection can be performed and the sensor status reported to the base station. The sensor position, internal clock settings, and north reference can be stored in memory and called by the DSP when the potential target is sensed.
The top-of-the-line sensor processor correlates long-range high-performance acoustics with seismic sensor data and transforms the data into feature eigenvectors for comparison with vehicle identification libraries. The sensor system can determine if the state of the vehicle is unknown, ignored or identified. Sensor systems classify unknown targets to achieve command and control analysis and identify potential new targets. The new target vector property can in turn be received by the sensor and added to the vehicle property vector library. Improvements to the feature vector architecture described above include improvements to the TCT sound performance with mechanical problems that allow the vehicle to operate but change the sound signal.
With a waterproof enclosure, low-power signal processing electronics and a system control board, unattended UGS field life can be as long as 12 months. A sensor with a waterproof housing and a good connection can operate from –40 ° C to 85 ° C. With regard to conserving battery power, the sensor system remains inert until a low-power command control and communication microprocessor (controls all subsystems) issues a trigger event. The command and control processor conserves power by shutting down a control system that provides initial memory storage data, including a GPS receiver and magnetic circuitry for acquiring sensor position and orientation. In the future, it is also possible to use the initial classification of the aircraft to avoid the need to identify the aircraft and consume power when the mission is to detect ground vehicle targets.
Due to internal sensor processing, only a small portion of the target data is transmitted for network-centric warfare. Low Intercept Rate (LPI) and LPD communication links may couple a low profile antenna to minimize detection for stealth operations. Embedded anti-jamming and anti-spoofing devices can also use off mode to reduce extraneous signals and target power failures.
The real-time display of battlefield images enables the submarine to have the ability to perform system management. The PC-based mapping and terrain software package (shown in Figure 3-2) can be integrated into the submarine or network center platform to provide geographic display of sensor information (vehicle identification, location, arrival time and relative orientation). This UGS data real-time display can be used not only for test systems, but also for general situation maps to support battle groups and joint operations.
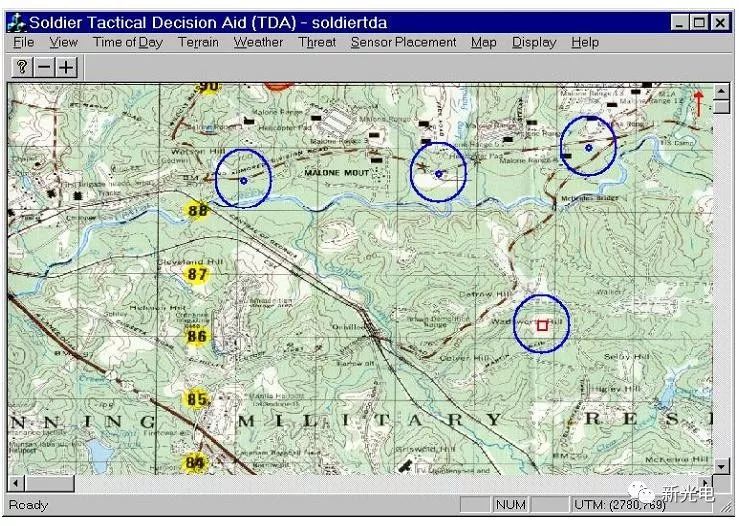
Figure 3-2 Soldier Tactical Decision Support
Communication
The ability of submarines to remain invisible and long-term (relatively fixed) strongly supports the role of their command nodes, whether in secret long-term ISR operations or in short-term missions such as IPB and pre-attack/cross-attack attacks. As a command and control combat platform, the submarine has the following characteristics:
Ability to maintain depth of potential while collecting and reporting battle group equipment information.
Provide a non-provocative environment in which ISR and IPB operations can enter an advanced phase.
Allows effective two-way communication when using a low visibility mast to keep the antenna invisible.
Transferring sensor data to an out-of-zone combat center or command and control node is an important part of this system-level concept. Since remotely deployed sensor areas are typically inaccessible and the power and antenna gain of these sensors is limited, some links and relays are required. Communication data links include:
UGS to drones/satellite
UAV/Satellite to Submarine/Out-of-Zone Operations Center (SOOC)
Unmanned aerial vehicle optical sound transmission to submarine
Submarine/out-of-zone combat center to other threat network nodes
The two-way communication embedded in UGS provides a way for the "system manager" to receive state detection, identify and analyze MASINT data, and update the sensor identification library using the new "feature vector" of interest. The LPD or LPI communication method must be selected to ensure communication reliability during sensor use.
UGS to drones/satellite
In order to communicate with the drone/satellite, the communication antenna transmission/reception mode must have a hemisphere (the highest point is the origin) function. The airdrop sensor system can be designed to communicate with orbit communication satellites VHF, military second generation UHF or L-band extended spectrum satellite communication systems. The low data rate and narrow bandwidth are consistent with the relatively low power UGS, which guarantees LPD/LPI. Processing intermediate data within UGS reduces the data rate. The narrow bandwidth allows the uplink to the satellite to be low frequency (VHF/UHF). This is also consistent with the need for UGS antennas to require a weakly focused beam pattern. With the Demand Assignment Multiple Access (DAMA) protocol, the satellite downlink is usually in a higher frequency band, such as the X-band, because it has a very large bandwidth to handle the use of various data rates and terrestrial coverage beams. , or even multiple users of spot beams.
Satellite communications allow long-term ISR operations (including UGS) for months to a year. UGS continuous long-term execution tasks are limited by the amount of power and data transmission, controlled by automatic or two-way communication. The UGS data transmitted by the tactical drone transceiver enables short-term intermediate communication. This usually means less restrictions on UGS power. For a given UGS, if the drone is "invisible" during the mission (the receiver's signal-to-noise ratio exceeds the threshold), the effective duty cycle is difficult to guarantee.
Drone/satellite to submarine
Currently, the “High Speed ​​Deepwater Communication†project is considering conversion and integration of technologies from industry, DARPA and foreign buoyancy cable systems, towing and rope systems. The AVXD antenna produced by GEC Marconi covers the spectrum of VHF, UHF LoS, UHF DAMA SATCOM, JTIDS, IFF, GPS and mobile phones. The current assessment of the AVXD by the Naval Underwater Operations Center will provide a record for the AN/BR-34s or OE-538 antennas in the existing SSN-688. DARPA asked MIT Lincoln Lab to demonstrate that UHF advanced buoyant cable antennas can provide sub-ships with transceiver functionality that is sized to meet OE-315 BCA antenna requirements. Retrievable Tethered Optical Fiber (RTOF) buoy is another two-way real-time communication system developed by the UK with UHF, SHF, electronic safeguards and video load capacity to meet US Navy requirements for submarine speed and depth. . Recyclable tethered fibers must meet other US Navy requirements for actual use. The short-term enhancement of current two-way satellite communications capabilities allows the submarine to continue non-provocative communications with UGS, providing critical TCT data updates to the Joint Task Force.
UAV optical two-way sensor or communication to submarine
Aerial hidden broadband water surface vibration laser detection and sound signal laser generation can be located inside the drone to detect surface or ground sound or vibration, reporting TCT for UGS deployment. Combining these two separate technologies to obtain a high-power infrared laser that excites sound pressure waves, and a low-power visible laser beam from a laser Doppler vibrometer for surface vibration detection.
These technologies passively measure the vibration of the air-water interface for detecting underwater sounds and generating active photoacoustic transmissions to ensure communication between the air and underwater platforms. These technologies can be used with specially designed opto-acoustic buoys. The buoys combine the transmission and reception of light and sound to ensure continuous communication between the drone and the submarine traveling at high speed and deep water. Air concealed operations are achieved by narrow laser beams, which are difficult to detect or intercept transmissions that are directed to significant RF signals.
Laser transmission and detection eliminates the need for special forces to provide communications between remote sensing, underwater and aerial platforms, and unmanned systems. Initial laboratory studies have been completed demonstrating the feasibility of this concept. Need to design the best prototype sensor to meet real environmental conditions and testing.
in conclusion
This paper describes a system-level concept for TCT detection and monitoring. The sensor that detects the TCT can be deployed by a submarine-launched drone. STUAV can be used as a data relay, optional deployment carrier and sensor platform. As the focus of the data and communication network described in this article, submarines can provide critical support to special operations forces and perform hidden ISRT missions. The submarine's privacy and long-term support for the use of the MASINT system (detection, monitoring and communication for the target of interest) on the ground non-provocative observation of enemy activities. The purpose of this system is to obtain information to achieve accurate and rapid resource deployment against enemy targets.
Phased deployment of sensors increases the accuracy of the aiming point. The initial search area determined by the ISR and the laser load system from STUAV are used together to prepare for and assist in battlefield damage assessment.
The overall value of the concept is that it provides the MASINT data necessary to optimize the deployment of military equipment in combat. Knowing the location and status of enemy weapons allows for precise response, which reduces the amount of resources required to respond and the cost of responding to threats, and more importantly, it can be deployed and controlled by hidden defense platforms such as submarines. ISR equipment to reduce the risk of casualties.
The USB HUBS is also known as a port replicator which is an external device designed for laptop computers. By copying or even extending the port of the notebook computer, the notebook computer can be easily connected with multiple accessories or external devices (such as power adapter, network cable, mouse, external keyboard, printer and external monitor) in one stop.
The USB C Hubs has both the functionality of a port replicator and is used to extend to a considerable degree of desktop functionality. Especially suitable for professionals, such as the need for more interface equipment. Using the laptop docking station for company, home or business presentations can also increase the ease of use and excellent scalability of the notebook. For example, consider using the UltraBay interface on the docking station to obtain an optical drive, burner, battery, numeric keypad, hard disk and other expansion functions.
The biggest use of the mini Type C Usb Hub is port expansion. As it is known to all, laptop computers are much less than desktop computers due to their own size limitations, both in terms of the number of ports and types, and sometimes it is difficult to meet the needs of users. The mini dock, on the other hand, offers multiple port extensions, like a laptop that suddenly has three heads and six arms. Some ports are most laptops do not have their own, such as serial port, PS/2, DVI, IBM dedicated floppy drive port. Some are more numerous than the body of a laptop, such as USB ports. These numerous ports allow the laptop to connect to more peripherals at the same time, improving the performance of the entire laptop and helping to increase productivity.

Usb Hubs,Multi Usb Adapter,Usb C Desktop Hub,Usb 3.0 Multi Port Hub
Henan Yijiao Trading Co., Ltd , https://www.yjusbhubs.com