
New wisdom: According to author Erico Guizzo, sourced from IEEE spectrum, compiled by Xinzhizuo and reprinted without permission!
Disney has one goal: to develop a robot that can interact with people. Just like other products from Disney, this robot called Jimmy looks very magical - think about it, if Jimmy in the Disneyland in the future is not someone but Jimmy, it's more Cool one thing!
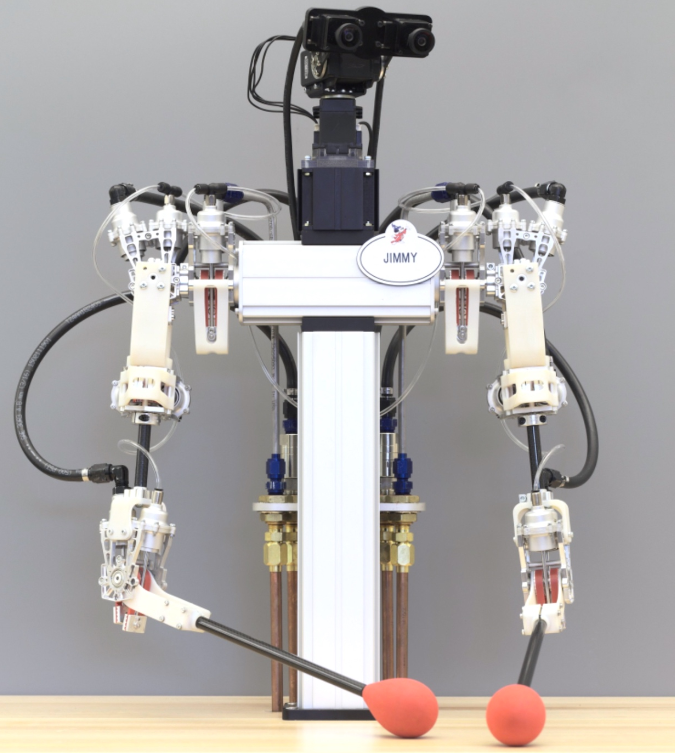
The action of other humanoid robots is very slow and rigid, which is fatal for Disney's grand goal. Jimmy has the ability to move fast like creatures, and the form is still very elegant. A video posted on the Internet earlier this year shows that Jimmy can wave to people, jump a few simple steps, and beat the desktop. Even more striking is that Jimmy can communicate with people in close proximity to people. In the video, Jimmy and a child are playing a game similar to "You shoot me a shot". In the process, Jimmy even gently pats the children's cheeks - this is you in other humanoid robots It is rarely seen in interactive experiments.
Of course, Jimmy is not magic. It only has advanced engineering techniques that make people clapping. Unlike the general humanoid robot, Jimmy is not driven by bulky motors and gears. It cites a completely new hydraulic power system designed by Disney experts. The hydraulic power system consists of tubes containing air and water. Although the current version requires human control of the movement, the future version will be fully automated.
can! This is very smooth!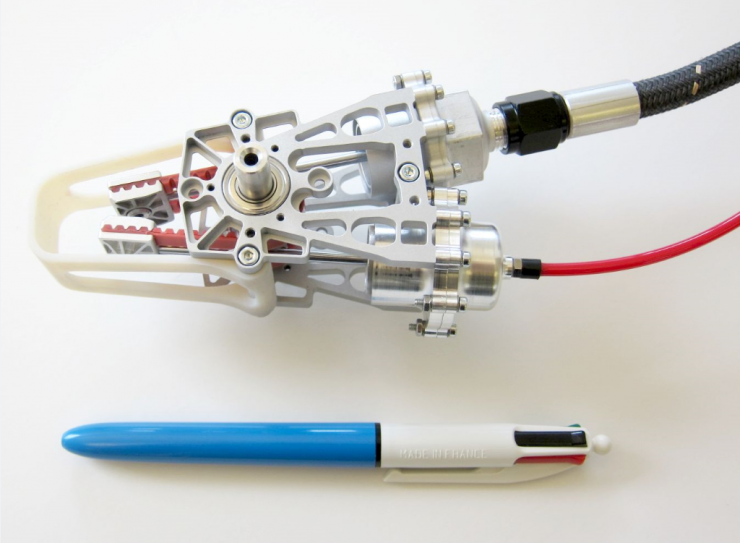 A few years ago, we first wrote about Disney's hydraulic power system. Since then, Whitney and colleagues from other Disney research teams, as well as Catholic University and Carnegie Mellon University experts have upgraded the design.
A few years ago, we first wrote about Disney's hydraulic power system. Since then, Whitney and colleagues from other Disney research teams, as well as Catholic University and Carnegie Mellon University experts have upgraded the design.
The initial power system utilized water and air. An upgraded hybrid device now utilizes two fluids for faster transmission. John P. Whitney, a Disney research team leader and currently teaching mechanical and industrial engineering at Northeastern University in Boston, said that the metal collar energy of this device is higher than that of a high leverage ratio servo system and brushless motor equipped with a harmonic actuator. Carrying greater weight. Its compatibility is also very high, and it has reverse braking performance, which is intrinsically safe - so it is particularly suitable for humanoid robot interaction.
Whitney said that when people saw Jimmy for the first time, most people felt it was in their hearts. "Every time I listen to people describing it as fluid, I feel quite funny."
Man behind the scenes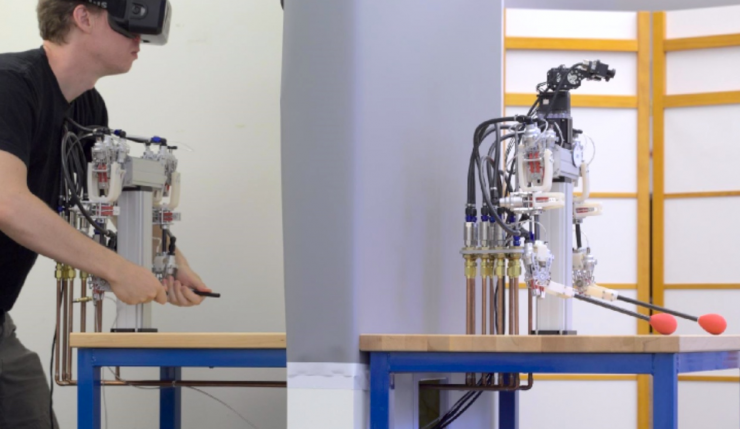 The biggest advantage of this power system is that unlike other engines or servo systems, you don't need to put complete systems in the robot's limbs, so they will be smaller and lighter. But at the same time, it has some drawbacks: just like other fluid-based systems, you need to check its pressure regularly. What's more, if you want to build a fully automated robot, you need to create an engine and control system that completely replaces manual control.
The biggest advantage of this power system is that unlike other engines or servo systems, you don't need to put complete systems in the robot's limbs, so they will be smaller and lighter. But at the same time, it has some drawbacks: just like other fluid-based systems, you need to check its pressure regularly. What's more, if you want to build a fully automated robot, you need to create an engine and control system that completely replaces manual control.
We hope to see Jimmy and other similar robots in future Disney parks. But what we most hope to witness is that hydraulic power systems can find other application channels besides entertainment. Especially in the field of personal robots.
Whitney said that this is indeed the area he most wanted to make a breakthrough: “The benefits to human operators are as valuable as automatic control, and the reverse braking performance and the lightweight performance of the transmission are all very high. Valuable features."
To better understand Jimmy, we interviewed a leader of the Disney Research team and currently teach Professor John P. Whitney of Mechanical and Industrial Engineering at Northeastern University in Boston. The following is an interview with Prof. John P. Whitney.
IEEE Spectrum: Jimmy's powertrain is very different from other engine and gear systems. What is your source of inspiration?
John P. Whitney: Our initial idea was the same as the MIT-developed WAM arm and other human interactions based on full resistance: using a lightweight, high-performance gearbox to place the engine inside the robot, not when they were placed into the occlusion At the point, it is hindered by the inertia from the cascade. The lightweight manipulator can move very quickly, so we can use a larger, low gear ratio engine that can reduce the increased friction and maintain some reverse braking performance. Unlike fixed cable drives, we can easily increase the freedom of the system by adding hydraulic lines. Everyone wants to create a simpler, cheaper system because the lightweight, high gear ratio, low-friction gearbox is very expensive.
IEEE Spectrum: Has this device been used in other systems?
John P. Whitney: Yes. Rolling diaphragms have been used for about a century in many industrial manufacturing, optical bench suspensions, and locomotive brake systems that do not use lubricants. However, except for use in hydraulic regulators, almost all methods of use are pneumatic. Compared to hydraulic systems, these rolling diaphragms are ideally suited for use in low pressure environments; the more costly manufacturing methods limit the rotation of the actuators, so they are not suitable for use in most industrial applications.
Our contribution is to use these rolling diaphragms ( manual or electric motors ) in hydrostatic devices instead of pumps and valves. In our latest paper published in ICRA, we found that mixing air-water hydrostatic devices would simplify the system more.
IEEE Spectrum: How did you feel when you put the prototype together and run it smoothly for the first time?
John P. Whitney: When I first tested the system, the input and output data corresponded perfectly. The speed of its rapid movement was staggering - it was almost like looking at a 3D mirror! Although the initial transmission is very heavy, and in the demonstration, it has only one bite, but this does not affect performance.
IEEE Spectrum: From the video we see this system is very fast. So, does it have any disadvantages? For example, need to maintain?
John P. Whitney: It has been confirmed that this diaphragm is very durable. Although theoretically they will wear out after a long time, but in the absence of friction, the fatigue of this reinforced fiber will be minimized, which will extend their life. Because the diaphragms are very soft, the reinforcing fibers are also cured, that is, they will "gracefully grow old."
After a long time, a small amount of transpiration occurs in the water inside the diaphragm, so within a month, we will calibrate the amount of water in the transmission. In the beginning, it was very difficult to install water in the system and let the air flow out. However, in the next generation of newly designed circulating devices, this problem will be solved perfectly.
IEEE Spectrum: Will you continue to research and develop this project at Northeastern University?
John P. Whitney: The development process of this project is very exciting, and it has great potential, which will have a great impact on the research of social robots in addition to entertainment functions. One area of ​​interest to me is remote needle biopsy that is compatible with MRI, and other MR-led procedures (that is, actuators that do not require iron and other metallic substances). These applications are very interesting, especially because they can provide real-time feedback when doctors use 3D MR video.
IEEE Spectrum: This system is perfect for remote control, but have you ever thought of using the engine on the operator to make it fully automatic?
John P. Whitney: The initial manual setup allowed us to identify hardware and mechanical challenges and artificial intelligence challenges. Under the guidance of the human operator, it has the function of imitating. Thus, in the future, the performance of high-tech AI will be very strong.
Via IEEE spectrum
Zgar International (M) SDN BHD , https://www.szvape-pen.com